关于PC200-6的维修数据
 我是陶强
2016-04-25
我是陶强
2016-04-25
2617
4
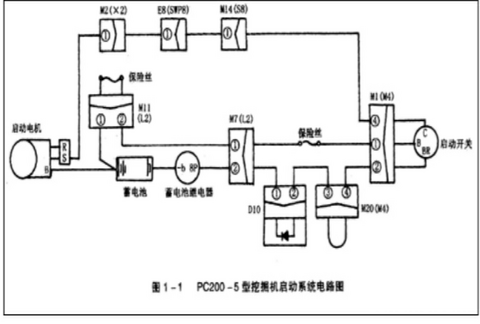
关于PC200-6的维修数据PPC控制流程: 电脑给操作柄输入信号,经过控制手柄的操作,反馈回变化的电压信号,输入到控制器K05,经过电脑处理后输出,输出电源来自控制器K03接点(11)和(21)。一、电阻值的测量:1、 小臂(ARM)控制EPC电磁阀(SOLENOID)电阻阻值为7-15欧姆。测量点:K11和K12。2、 动臂(BOOM)控制EPC电磁阀(SOLENOID)电阻阻值为7-15欧姆。测量点:K9和K10。3、 铲斗(BUCKET)控制EPC电磁阀(SOLENOID)电阻阻值为7-15欧姆。测量点:K13和K14。4、 回转(SWING)控制EPC电磁阀(SOLENOID)电阻阻值为7-15欧姆。测量点:K15和K16。二、电压值的测量:可以调出监控代码显示,监控代码显示如下: 1 、50:在中位是应该在2.5±0.25V,操作全行程时,一侧为3.87-4.52V,另一侧为0.66-0.97V2 、51:在中位是应该在2.5±0.25V,操作全行程时,一侧为3.87-4.52V,另一侧为0.66-0.97V3 、52:在中位是应该在2.5±0.25V,操作全行程时,一侧为3.87-4.52V,另一侧为0.66-0.97V4 、53:在中位是应该在2.5±0.25V,操作全行程时,一侧为3.87-4.52V,另一侧为0.66-0.97V5 、54:在中位是应该在2.5±0.25V,操作全行程时,一侧为3.87-4.52V,另一侧为0.66-0.97V6 、55:在中位是应该在2.5±0.25V,操作全行程时,一侧为3.87-4.52V,另一侧为0.66-0.97V7 、56:在中位是应该在2.5±0.25V,操作全行程时,一侧为3.87-4.52V,另一侧为0.66-0.97V8 、57:在中位是应该在2.5±0.25V,操作全行程时,一侧为3.87-4.52V,另一侧为0.66-0.97V测量点:操作手柄下方的电位计插孔。控制器输入电压测量:K03接点(11)和(21)为EPC电磁阀电源,如果没有电源输入,EPC电磁阀将无法工作。K03接点(1)和(12)为内部接地。因此需要测量(11)和(21)与(1)和(12)之间电压应该在20-30V。三、电流的测量:可以调出监控代码显示,监控代码显示如下:[table]
[tr][td=40]60[/td][td=246]大臂提升EPC电磁阀电流(HYPER GX)[/td][td=49]10mA[/td][td=145]根据操作行程变化[/td][/tr]
[tr][td=40]61[/td][td=246]大臂下降EPC电磁阀电流(HYPER GX)[/td][td=49]10mA[/td][td=145] [/td][/tr]
[tr][td=40]62[/td][td=246]小臂收回EPC电磁阀电流(HYPER GX)[/td][td=49]10mA[/td][td=145] [/td][/tr]
[tr][td=40]63[/td][td=246]小臂伸出EPC电磁阀电流(HYPER GX)[/td][td=49]10mA[/td][td=145] [/td][/tr]
[tr][td=40]64[/td][td=246]铲斗弯曲EPC电磁阀电流(HYPER GX)[/td][td=49]10mA[/td][td=145] [/td][/tr]
[tr][td=40]65[/td][td=246]铲斗卸料EPC电磁阀电流(HYPER GX)[/td][td=49]10mA[/td][td=145] [/td][/tr]
[tr][td=40]66[/td][td=246]右回转EPC电磁阀电流(HYPER GX)[/td][td=49]10mA[/td][td=145] [/td][/tr]
[tr][td=40]67[/td][td=246]左回转EPC电磁阀电流(HYPER GX)[/td][td=49]10mA[/td][td=145] [/td][/tr]
[/table]
 风雨雨
2016-10-28
风雨雨
2016-10-28
 胜利双手创
2016-06-27
胜利双手创
2016-06-27
 学习者老杨
2016-04-26
学习者老杨
2016-04-26