330D, 336D 和 340D 挖掘机 液压系统原理
先导液压系统CAT卡特330D 336D和340D挖掘机和330D废料搬运设备液压系统运行
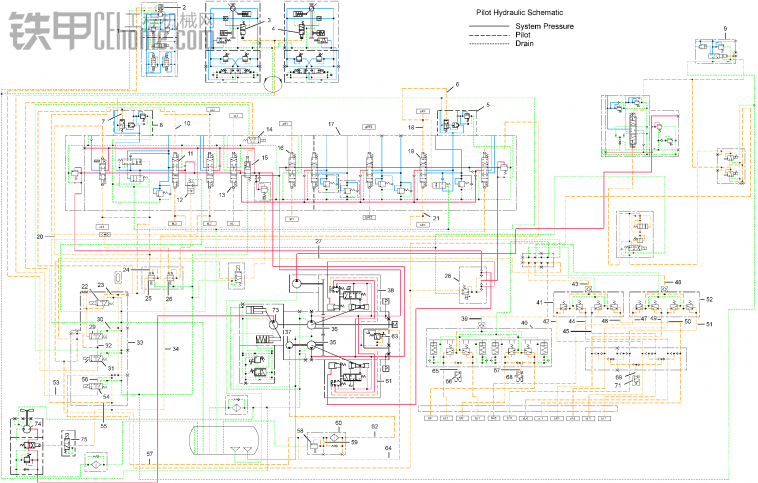
图 1
(1) 管路(从回转制动器电磁阀流出的先导油)
(2) 回转制动器
(3) 油量切换阀(左行驶马达)
(4) 油量切换阀(右行驶马达)
(5) 动臂沉降阻尼阀
(6) 先导管路(流向动臂下降控制阀的先导压力)
(7) 先导管路(传递到斗杆下降控制阀的先导压力)
(8) 斗杆沉降阻尼阀
(9) 防漂移阀
(10) 先导管路(STICK IN [斗杆进入])
(11) 斗杆 I 控制阀
(12) 可变回转优先阀
(13) 左行驶控制阀
(14) 电磁阀(直行)
(15) 直行控制阀
(16) 右行驶控制阀
(17) 主控制阀
(18) 先导管路(BOOM LOWER [动臂下降])
(19) 动臂 I 控制阀
(20) 先导管路(从动臂先导控制阀流出的先导油)
(21) 先导管路(BOOM RAISE [动臂上升])
(22) 液压启动电磁阀
(23) 油道
(24) 先导管路(流向动臂优先减压阀的先导油)
(25) 动臂优先减压阀
(26) 回转优先减压阀
(27) 先导管路(流向先导控制阀的先导油)
(28) 比例减压阀(反向流量控制)
(29) 阀(液压启动)
(30) 油道
(31) 回转制动器电磁阀
(32) 油道
(33) 先导歧管
(34) 先导管路(流向回转优先减压阀的先导油)
(35) 引导轮泵
(36) 驱动泵
(37) 先导泵
(38) 油道(动力换档压力)
(39) 先导管路(流向行驶先导控制阀的先导油)
(40) 行驶先导控制阀
(41) 斗杆和回转先导控制阀
(42) 先导管路(STICK OUT [斗杆伸出])
(43) 先导管路(流向斗杆和回转先导控制阀的先导油)
(44) 先导管路(STICK IN [斗杆进入])
(45) 先导管路(SWING LEFT [左回转])
(46) 先导管路(SWING RIGHT [右回转])
(47) 先导管路(GRAPPLE OPEN [铲斗打开])
(48) 先导管路(流向抓斗和动臂先导控制阀的先导油)
(49) 先导管路(GRAPPLE CLOSE [铲斗关闭])
(50) 先导管路(BOOM LOWER [动臂下降])
(51) 先导管路(BOOM RAISE [动臂上升])
(52) 抓斗和动臂先导控制阀
(53) 先导管路(传递到油量切换阀的先导压力)
(54) 行驶速度电磁阀
(55) 先导管路(流向直行控制阀的先导油)
(56) 油道
(57) 先导管路(流向先导油歧管的先导油流)
(58) 先导安全阀
(59) 油道
(60) 先导滤清器
(61) 油道(动力换档压力)
(62) 先导管路(从先导泵流向先导油滤清器的先导油)
(63) 比例减压阀(动力换档压力)
(64) 先导管路(流向泵调节器的先导油流)
(65) 先导管路(传递到左行驶压力开关的先导压力)
(66) 行驶压力开关(左)
(67) 先导管路(传递到右行驶压力开关的先导压力)
(68) 行驶压力开关(右)
(69) 先导管路(传递到机具/回转压力开关的先导压力)
(71) 机具/回转压力开关
(73) 风扇泵
(74) 风扇马达(液压油冷却器)
(75) 电磁阀(风扇控制)
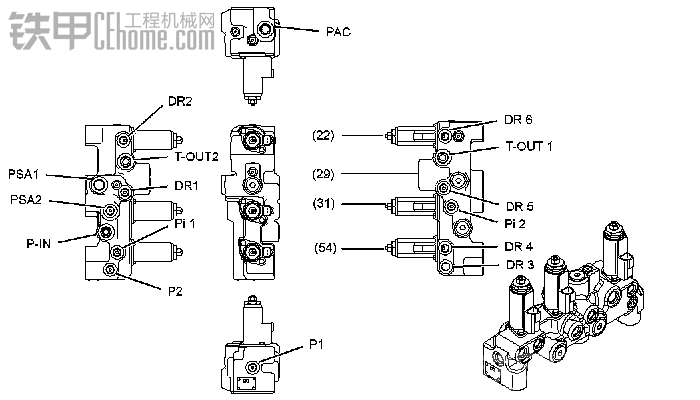
图 2
先导歧管上的孔口和电磁阀
(22) 液压启动电磁阀
(29) 阀(液压启动)
(31) 回转制动器电磁阀
(54) 行驶速度电磁阀
先导油回路先导回路压力受到先导安全阀 (58) 限制。
先导泵 (37) 输送的机油执行以下主要功能:
产生先导油压力,以控制主泵的输出流量。对机具、回转和行驶先导控制阀产生先导油压力,以执行机器操作。产生先导油压力,以自动操作控制装置。产生用于冷却风扇控制装置的先导油。
注: 每个先导回路执行一种上述功能。
先导回路可划分为以下回路类型:
动力换档压力系统先导控制阀回路压力开关回路直行阀回路回转制动器动臂优先回转优先行驶速度自动变换冷却风扇控制
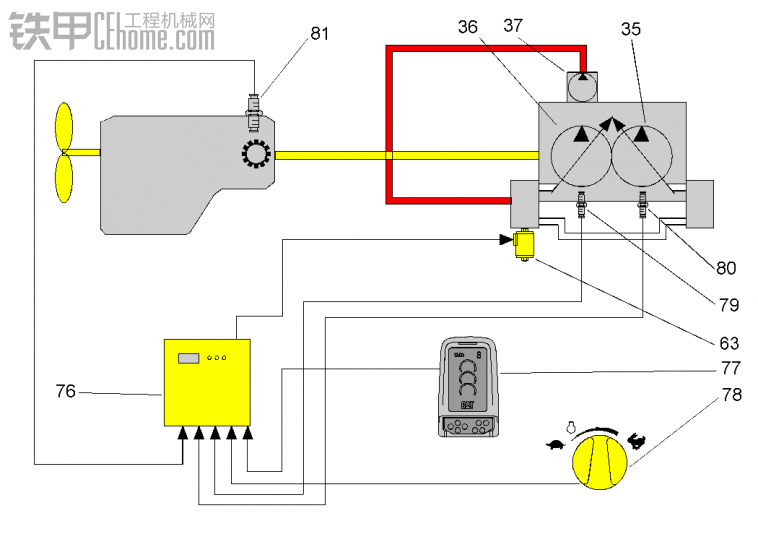
动力换档压力系统
图 3
(35) 引导轮泵
(36) 驱动泵
(63) 比例减压阀(PS 压力)
(37) 先导泵
(76) 机器 ECM
(77) 监视器
(78) 发动机转速旋钮
(79) 驱动泵压力传感器
(80) 引导轮泵压力传感器
(81) 发动机转速传感器
在机器运行过程中,机器 ECM (76) 接收以下部件发出的输入信号:
发动机转速旋钮 (78)位于飞轮壳上的发动机转速传感器 (81)驱动泵压力传感器 (79)引导轮泵压力传感器 (80)驾驶室中的监视器 (77)
机器 ECM (76) 连续监测所有的输入信号。 机器 ECM 处理输入信号,然后向驱动泵调节器的比例减压阀 (63) 发送输出信号。 比例减压阀协助控制驱动泵 (36) 和引导轮泵 (35) 的输出流量。
先导泵 (37) 输送的机油经过先导油滤清器流向驱动泵调节器的比例减压阀 (63) 。 机器 ECM (76) 发出的电信号促使比例减压阀 (63) 将先导压力调节到较低的压力水平。 降低的压力称为动力换档压力 (PS)。 比例减压阀通过驱动泵调节器和引导轮泵调节器传递降低的先导油压力。 驱动泵 (36) 和引导轮泵 (35) 的输出流量根据动力换档压力进行控制。 动力换档压力用于调节允许的液压泵最大输出。
当机器 ECM 探测到任何输入信号变化时,机器 ECM 向比例减压阀发送的输出信号将会变化。 传递到驱动泵和引导轮泵调节器的动力换档压力也将变化,以调节允许的液压泵最大输出。 这样将保持所需的发动机转速。
发动机转速降低将使动力换档压力升高。 如果动力换档压力升高,将出现驱动泵和引导轮泵减少冲程的状况。 允许的最大液压功率输出降低。
发动机转速升高将使动力换档压力降低。 如果动力换档压力降低,将出现驱动泵和引导轮泵加大冲程状况。 允许的最大液压功率输出升高。
注: 有关机器 ECM 操作的更多信息,请参阅系统操作/测试和调整, "机器电子控制系统"。
先导控制阀回路
从先导泵 (37) 流出的机油经过先导管路 (62) 、先导油滤清器 (60) 和先导管路 (57) ,流向先导歧管 (33) 。 当液压启动操纵杆移到 UNLOCKED(解锁)位置时,机器 ECM 接通液压起动电磁阀 (22) 。 然后,先导油促使阀 (29) 移动。 现在,先导油流过阀 (29) 和先导管路 (27) 。 接下来,先导油流向控制机具、回转和行驶功能的先导控制阀 (40) 、 (41) 和 (52) ,以执行机器操作。 当移动操纵手柄和/或行驶操纵杆/踏板时,先导油流向主控制阀 (17) ,以控制机器功能。
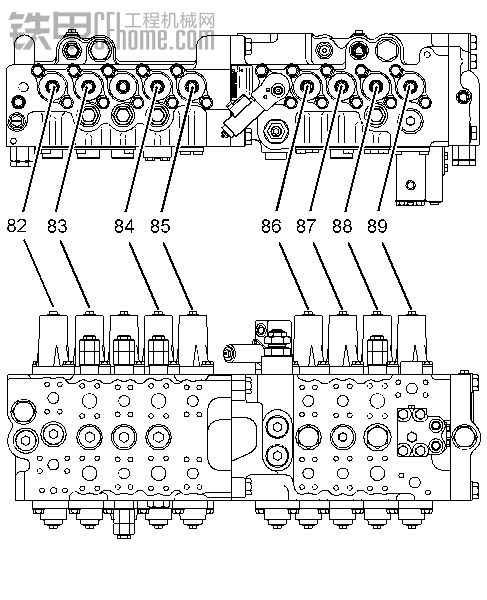
图 4
当操作操纵手柄 (41) 和/或操纵手柄 (52) 时,先导控制阀将先导泵机油经过先导管路输送到主控制阀上的先导口,以移动主控制阀上的滑阀。 请参阅图 4 和表 1,以了解先导管路的位置和机器的操作。
表 1[table]
[tr][td]先导管路[/td][td]控制阀[/td][td]机器的操作[/td][/tr]
[tr][td](82)[/td][td]斗杆 II 控制阀[/td][td]STICK IN(斗杆进入)[/td][/tr]
[tr][td](83)[/td][td]动臂 I 控制阀[/td][td]BOOM LOWER(动臂下降)[/td][/tr]
[tr][td](84)[/td][td]抓斗控制阀[/td][td]抓斗 CLOSE(关闭)[/td][/tr]
[tr][td](85)[/td][td]右行驶控制阀[/td][td]REVERSE RIGHT TRAVEL(反向右行)[/td][/tr]
[tr][td](86)[/td][td]左行驶控制阀[/td][td]REVERSE LEFT TRAVEL(反向左行)[/td][/tr]
[tr][td](87)[/td][td]回转控制阀[/td][td]SWING LEFT(左回转)[/td][/tr]
[tr][td](88)[/td][td]斗杆 I 控制阀[/td][td]STICK IN(斗杆进入)[/td][/tr]
[tr][td](89)[/td][td]动臂 II 控制阀[/td][td]BOOM RAISE(动臂上升)[/td][/tr]
[/table]
从先导控制阀流出的先导油经过先导管路流向主控制阀底部的孔口,以执行相反的操作。
以下示例用于说明 BOOM LOWER(动臂下降)操作和 BOOM RAISE(动臂上升)操作。 机器的斗杆操作、抓斗操作、行驶操作和回转操作按照与动臂操作相同的方式完成。
当动臂操纵手柄移到 BOOM RAISE(动臂上升)位置时,从先导控制阀 (52) 流出的先导油经过先导管路 (21) ,流向动臂 I 控制阀 (19) 。 在先导压力的作用下,动臂 I 控制阀移动。 驱动泵输送的机油流向动臂油缸的缸盖端,以执行 BOOM RAISE(动臂上升)操作。
当动臂操纵手柄移到 BOOM LOWER(动臂下降)位置时,从先导控制阀 (52) 流出的先导油经过先导管路 (18) ,流向动臂 I 控制阀 (19) 。 在先导压力的作用下,动臂 I 控制阀移动。 现在执行 BOOM LOWER(动臂下降)操作。
压力开关回路
压力开关 (66) 和 (68) 与行驶先导控制阀 (40) 相连。 压力开关 (71) 与先导控制阀 (41) 和先导控制阀 (52) 相连。 当所有操纵手柄和/或行驶操纵杆/踏板都处于 NEUTRAL(空档)位置时,传递到压力开关的先导油压力很低。 压力开关 (66) 、 (68) 和 (71) 处于OFF (断开)状态。 机器 ECM 识别出所有压力开关的 OFF(断开)状态。 AEC 系统启动,以降低发动机转速。
如果任何操纵手柄和/或行驶操纵杆/踏板移离 NEUTRAL(空档)位置,传递到压力开关的先导油压力将升高。 如果压力开关 (66) 、 (68) 和/或 (71) 处于 ON(接通)位置,机器 ECM 启动 AEC 系统以增大发动机转速。
如果行驶操纵杆/踏板与任一操纵手柄同时移离 NEUTRAL(空档)位置,先导油压力将使压力开关 (66) 、 (68) 和 (71) 处于 ON(接通)位置。 此时,将向机器 ECM 发送电信号。 机器 ECM 接通直行电磁阀 (14) 。 现在,先导压力启动直行控制阀 (15) 。
直行控制阀将引导轮泵提供的液压油流输送到行驶控制阀 (13) 和 (16) 。 而驱动泵将所有机油输送至主控制阀中的其他阀。
如果机器配有直行踏板,将可通过独立的压力开关向机器 ECM 发送信号。 当直行踏板离开 (NEUTRAL(空档)) 位置时,将向机器 ECM 发送信号,以接通直行电磁阀 14。
有关直行控制阀操作的更多信息,请参阅系统操作, "控制阀(直行)"。
回转制动器当液压启动操纵杆置于 UNLOCKED(解锁)位置时,油道 (30) 中的先导油经过阀 (29) 和油道 (32) ,流向回转制动器电磁阀 (31) 。 当任何操纵手柄移离 NEUTRAL(空档)时,先导管路 (69) 中的先导压力升高,启动机具/回转压力开关 (71) 。 然后,机具/回转压力开关向机器 ECM 发送电信号。 机器 ECM 发出的电信号接通回转制动器电磁阀 (31) 。 管路 (1) 中的先导油流向回转制动器 (2) 。 这些机油释放回转制动器。
有关回转制动器操作的更多信息,请参阅系统操作, "先导阀(回转停车制动器)"。
动臂优先在 BOOM RAISE(动臂上升)和 STICK IN(斗杆进入)组合操作过程中,先导管路 (20) 和先导管路 (24) 中的先导油压力启动动臂优先减压阀 (25) 。 动臂优先减压阀 (25) 可通过禁用斗杆 II 控制阀,使机油在这些组合液压操作过程中优先流向动臂油缸的缸盖端。
有关动臂优先减压阀的更多信息,请参阅系统操作, "动臂液压系统"。
回转优先在回转操作过程中,先导油从先导控制阀 (41) 流向回转优先减压阀 (26) 。 回转优先减压阀移动。 先导管路 (34) 中来自先导油歧管 (33) 的先导油流被回转优先减压阀 (26) 阻断。 引导轮泵输出的大部分机油流向回转马达。
有关回转优先减压阀的更多信息,请参阅系统操作, "回转液压系统"。
行驶速度自动变换阀油道 (56) 中的先导油流向行驶速度电磁阀 (54) 。 当右控制台上的行驶速度开关设置在 HIGH SPEED(高速)位置时,行驶速度电磁阀打开。 这样将使先导油流过行驶速度电磁阀 (54) 和管路 (53) 。 然后,机油流向左行驶马达 (3) 的油量切换阀和右行驶马达 (4) 的油量切换阀。 在油量切换阀工作时,行驶速度保持在 HIGH SPEED(高速)位置。
当右控制台上的行驶速度开关设置在 HIGH SPEED(高速)位置时,用于感应泵输出压力的压力传感器根据行驶负载控制行驶速度。 例如,在高负载情况下低速行驶,而在低负载情况下高速行驶。
有关油量切换阀操作的更多信息,请参阅系统操作, "油量切换阀"。更多资料请点击:CAT卡特330D 336D和340D挖掘机和330D废料搬运设备液压系统运行

 心随车动1855
2017-02-18
心随车动1855
2017-02-18
 心随车动1855
2017-02-18
心随车动1855
2017-02-18
 断南桥
2015-11-09
断南桥
2015-11-09
 挖了个去
2015-11-09
挖了个去
2015-11-09

 挖了个去
2015-11-09
挖了个去
2015-11-09





