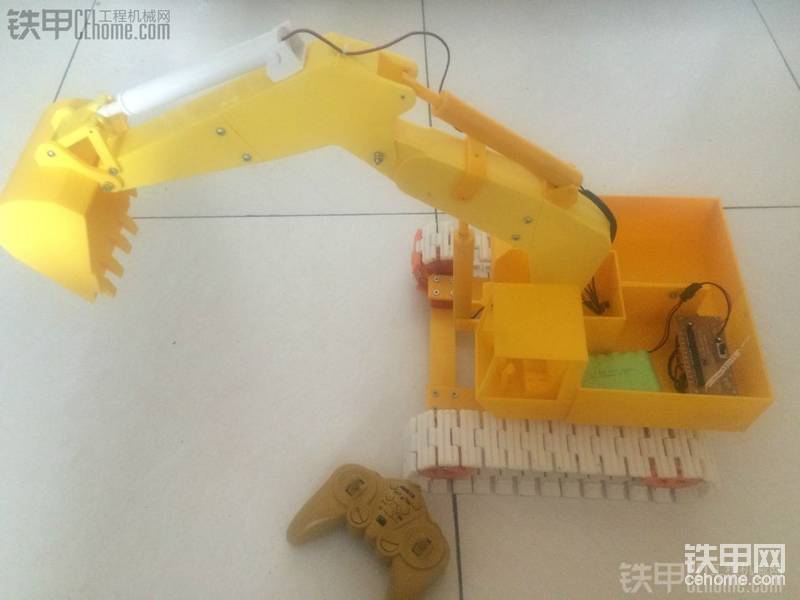
先来一张定妆照
配备了一款2.4GHz的15通道控制器,确实如甲友说的,这个控制器操作布局不是很好。后期我会自己设计仿真的“十”字挖机操作杆和行走操作杆,鉴于第一代先满足基本功能即可。后期需要调整的模型设计还很多,最大的问题就是减重。
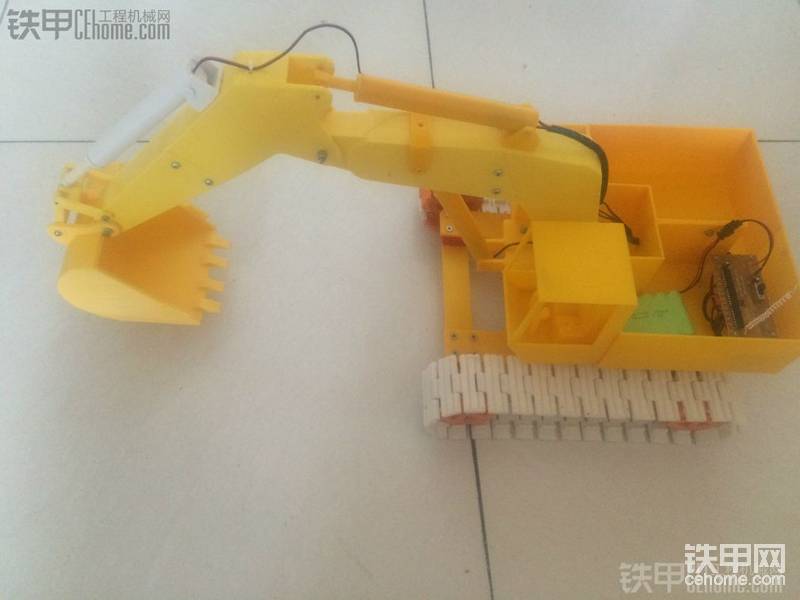
电路控制单元,可以实现真实挖机的所有动作。
控制挖斗的电动仿真液压杆,请大家原谅颜色不统一。
控制小臂的电动仿真液压杆
控制大臂的电动仿真液压杆,最早的时候设计的是双电动仿真液压杆推动大臂,可是调试的时候发现会出现双推杆动作不协调的问题,然后就修改了设计,具体原因还在细查。现在一个推动杆虽然有点吃力但是还够用。
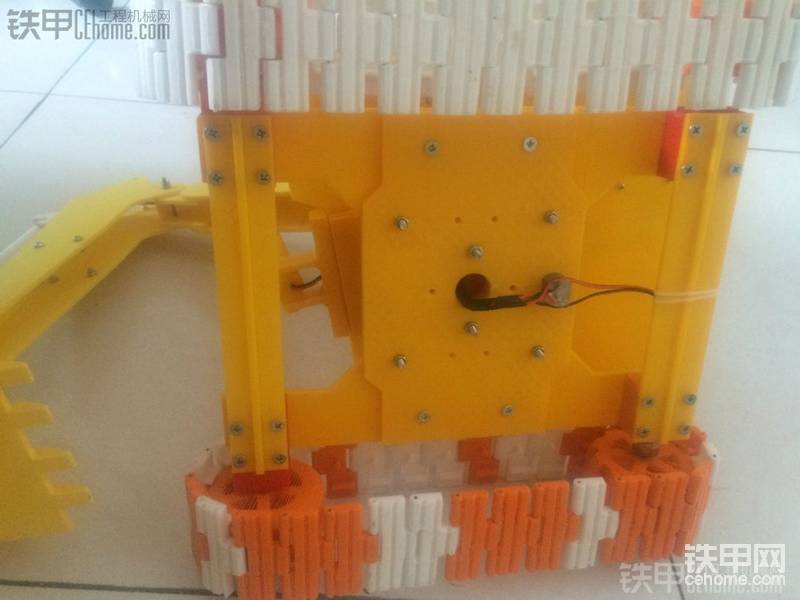
挖机旋转机构设计
挖机地盘设计及加固
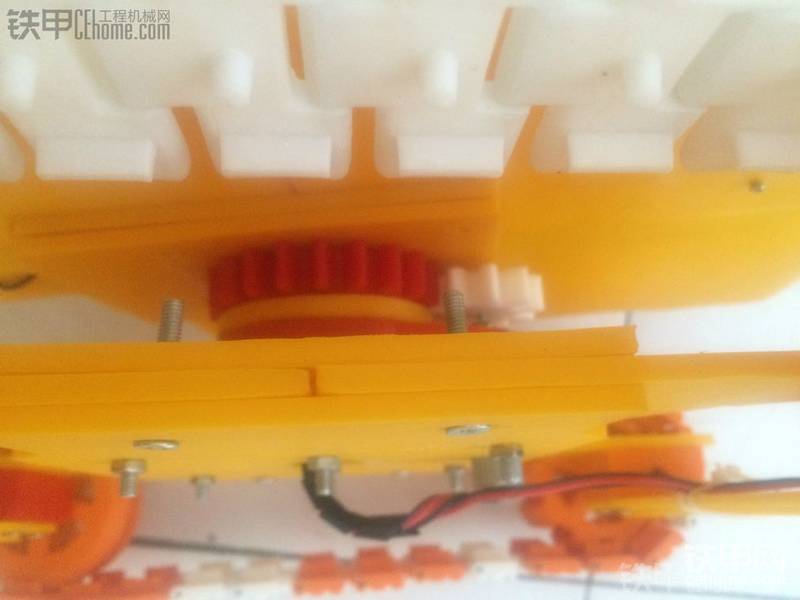
挖机行走设计,不过没有加负重轮,现在行走有力速度也不算慢
挖机摆几个poss
摆在书柜上与其他小伙伴的合影照