
发帖
评论
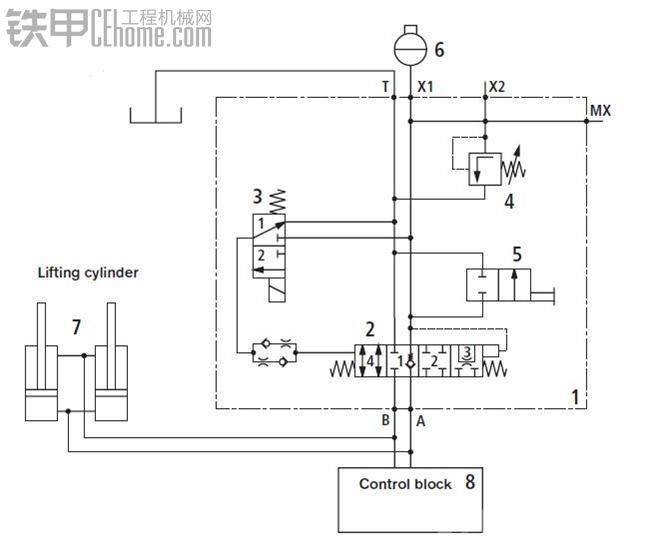
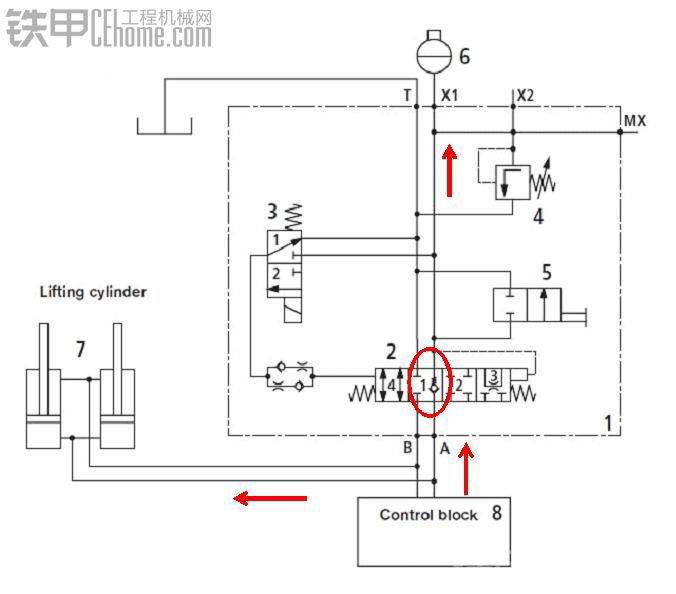
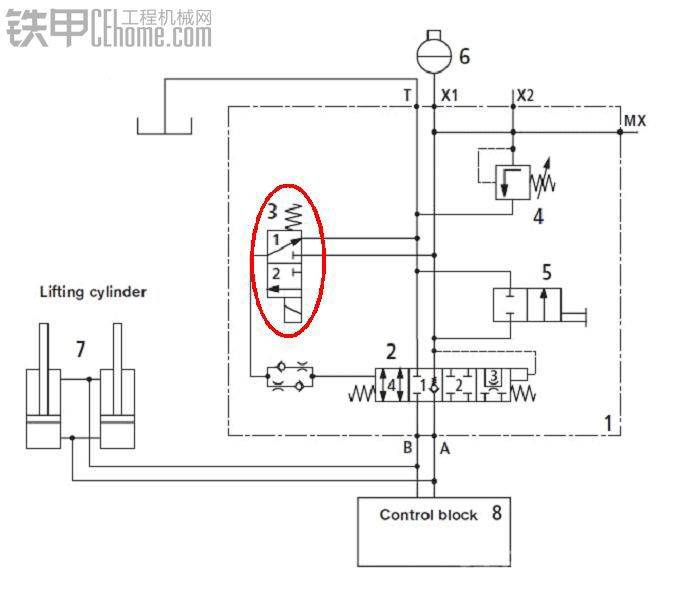
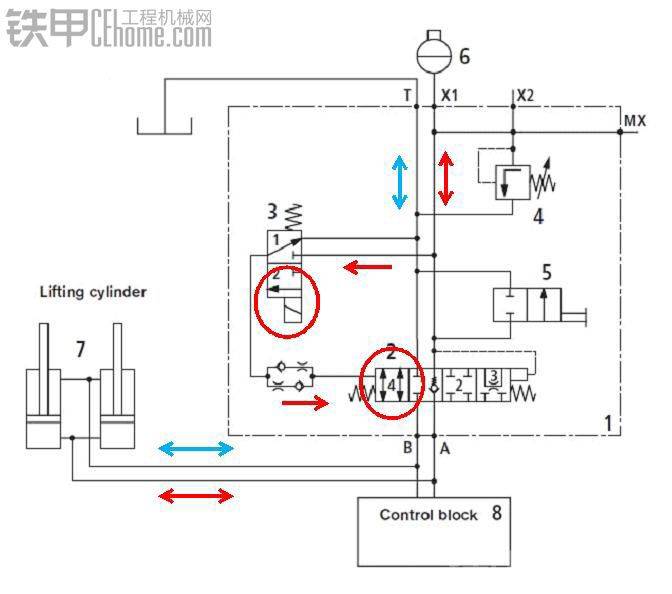
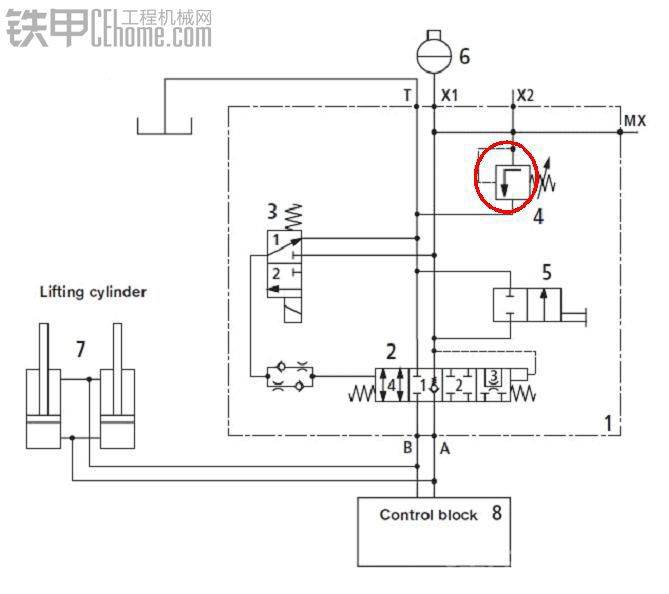
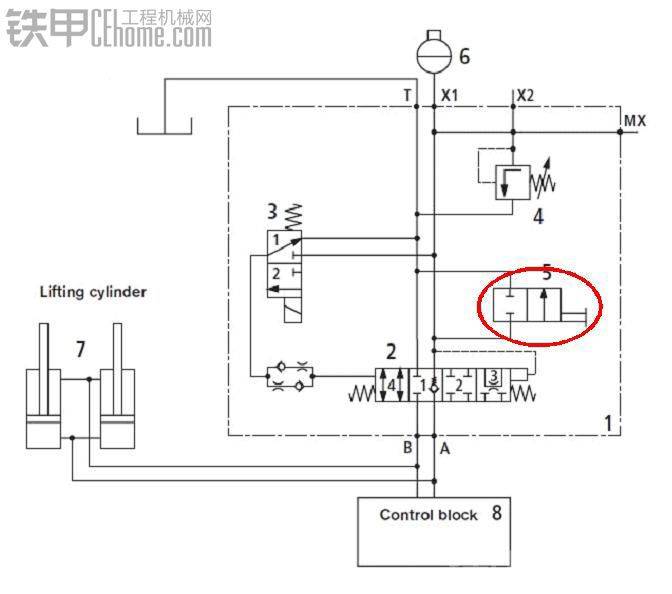
装载机行驶稳定系统RIDE CONTROL原理解析







图片
-
 chancheren
2019-08-25
chancheren
2019-08-25
感谢大师分享核心技术,上海一别,弹指五年间。作为一线司机,如果没有这项配置遇到颠簸时,可根据颠簸程度,可以适当快速放升大臂或放收铲斗,可带来类似效果,如果控制得当,有很好效果。有一点可以肯定的是设计者一定是文武兼备,不但精通原理,且实际操作经验超级丰富,理论结合实际。
回复(0)
-
 A秋风落叶
2019-08-10
A秋风落叶
2019-08-10
可以加一下'QQ或微信吗大师
回复(0)
-
 leeee
2018-03-11
leeee
2018-03-11
没有的 这个东西欧美的用户喜欢
回复(0)
-
 leeee
2018-03-11
leeee
2018-03-11
这个倒不是,配置这个要加个万八的,国内的舍不得
回复(0)
-
 liugong856D
2018-03-11
liugong856D
2018-03-11
应该高配置的车应该有吧。高端货?
回复(0)
-
 leeee
2018-03-11
leeee
2018-03-11
出口的 5吨以上的机子才有
回复(0)
-
 西北快车
2018-03-11
西北快车
2018-03-11
学习
 :victory
:victory
回复(0)
-
 liugong856D
2018-03-11
liugong856D
2018-03-11
国产的都没有吗。比如856.中配置以上
回复(0)
-
 liugong856D
2018-03-11
liugong856D
2018-03-11
哦哦。这个世界,奸商多阿。
回复(0)
-
 liugong856D
2018-03-11
liugong856D
2018-03-11
哦哦。{:soso_e149:}中国人就低人一等吗!回复(0)